in C++, come in tutti i linguaggi di programmazione ad oggetti,
è possibile organizzare le definizioni di classi in
gerarchie di ereditarietà,
dove ogni classe derivata
eredita membri pubblici, tranne i costruttori, e protected dalle classi che la precedono
nella gerarchia
l'ereditarietà si dice:
-
singola
se la struttura gerarchica è ad albero
-
multipla se la struttura gerarchica è
un grafo diretto aciclico (DAG)
la derivazione immediata di una classe
D, detta
derivata, da una classe
B, detta
di base,
si codifica con la sintassi:
in cui la specifica public
mantiene inalterata la visibilità dei membri ereditati
-
è altrimenti possibile specificare
protected oppure
private, per i corrispondenti abbassamenti di visibilità dei
membri ereditati
in una classe derivata si può ridefinire
il corpo di funzioni membro ereditate
-
se
D eredita
f() da
B ma ne ridefinisce il corpo, allora l'invocazione a.f()
esegue la definizione data in D se
a è di tipo D; tuttavia, se p
è un riferimento di tipo B*,
allora dopo l'assegnamento p = &a;
l'invocazione (*p).f()
esegue la definizione data in B, sebbene l'oggetto su cui si
invoca f() sia lo stesso
, a meno che ...
... se una funzione è dichiarata virtual, allora le sue
invocazioni su oggetti seguono la definizione data nel tipo dell'oggetto
piuttosto che in quello determinato dal riferimento
-
questo fenomeno è detto binding dinamico
-
permette il polimorfismo dell'invocazione
di funzioni
-
le funzioni virtuali possono essere ridefinite
in classi derivate, tuttavia hanno in genere una definizione (di default)
nella classe di base, a meno che ...
... una funzione virtuale pura
non ha definizione nella classe di base, detta
astratta, e deve
essere definita nelle classi concrete derivate
da essa
-
una classe è astratta se ha almeno una funzione virtuale pura, altrimenti
è concreta
-
sintassi:
virtual <tipo> <nome_funzione> (<lista_tipi>) = 0;
-
una classe astratta non ha istanze
-
un costruttore non può essere virtuale...
perché?
un'altra importante classe contenitore è la
coda, ingl.
queue :
sequenza finita, di lunghezza variabile,
di dati omogenei, ad accesso sequenziale con disciplina
FIFO
la coda è una struttura dati fondamentale:
-
nella comunicazione:
canali di trasmissione
-
nella concorrenza:
-
gestione FIFO di richieste di servizio
-
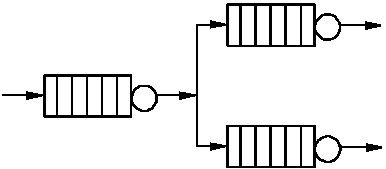
reti di code,
ingl. queueing networks
queue.h:
come nel caso dell'interfaccia della pila,
per esplorare implementazioni diverse dell'ADT con diverse strutture dati,
usiamo una direttiva #include
per la parte privata: